机器手臂(1):研究舵机固定支架
本文共 1386 字,大约阅读时间需要 4 分钟。
本文的原文连接是: 未经博主允许不得转载。
博主地址是:1,机器手臂
开始想做机器人,发现难度比较大,选择一个比较容易的入手开始做。
做一个最简单的手臂。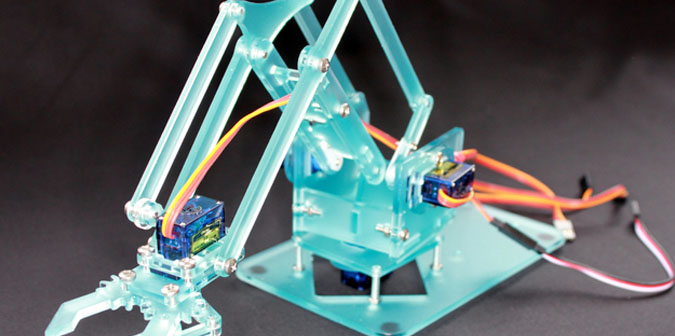 但是,不是购买材料组装,而是自己设计。
但是,不是购买材料组装,而是自己设计。 2,首先了解下舵机
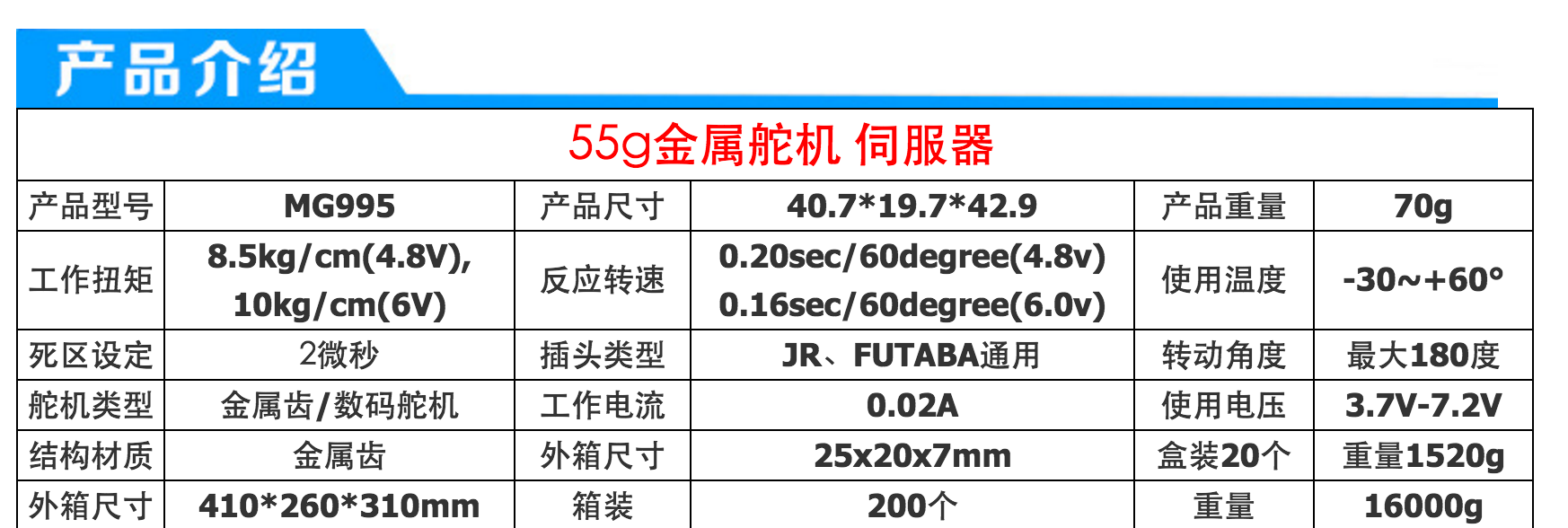
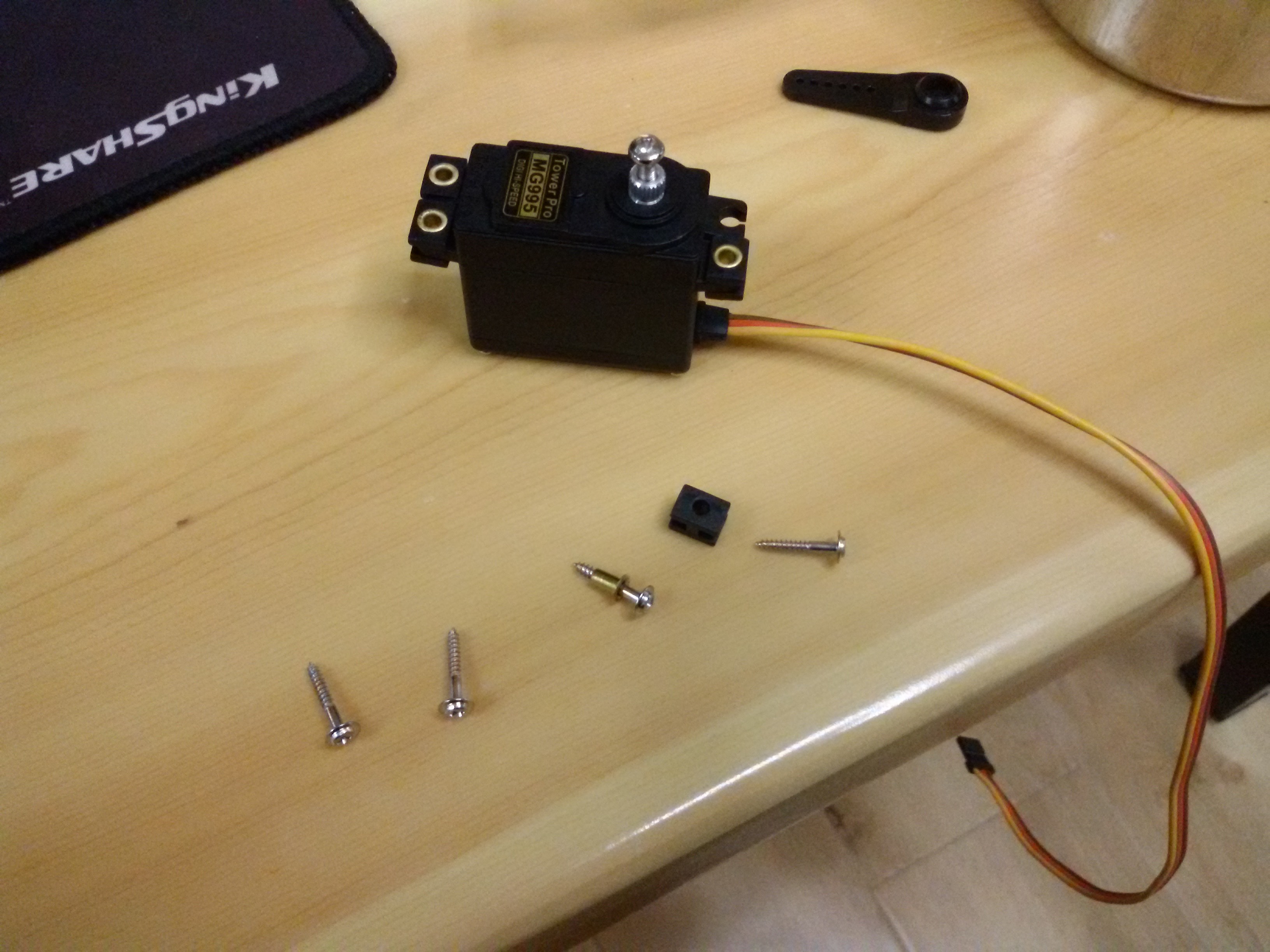 有橡胶垫,有小铜管,螺丝。
有橡胶垫,有小铜管,螺丝。  只要设计好支架就行。
只要设计好支架就行。 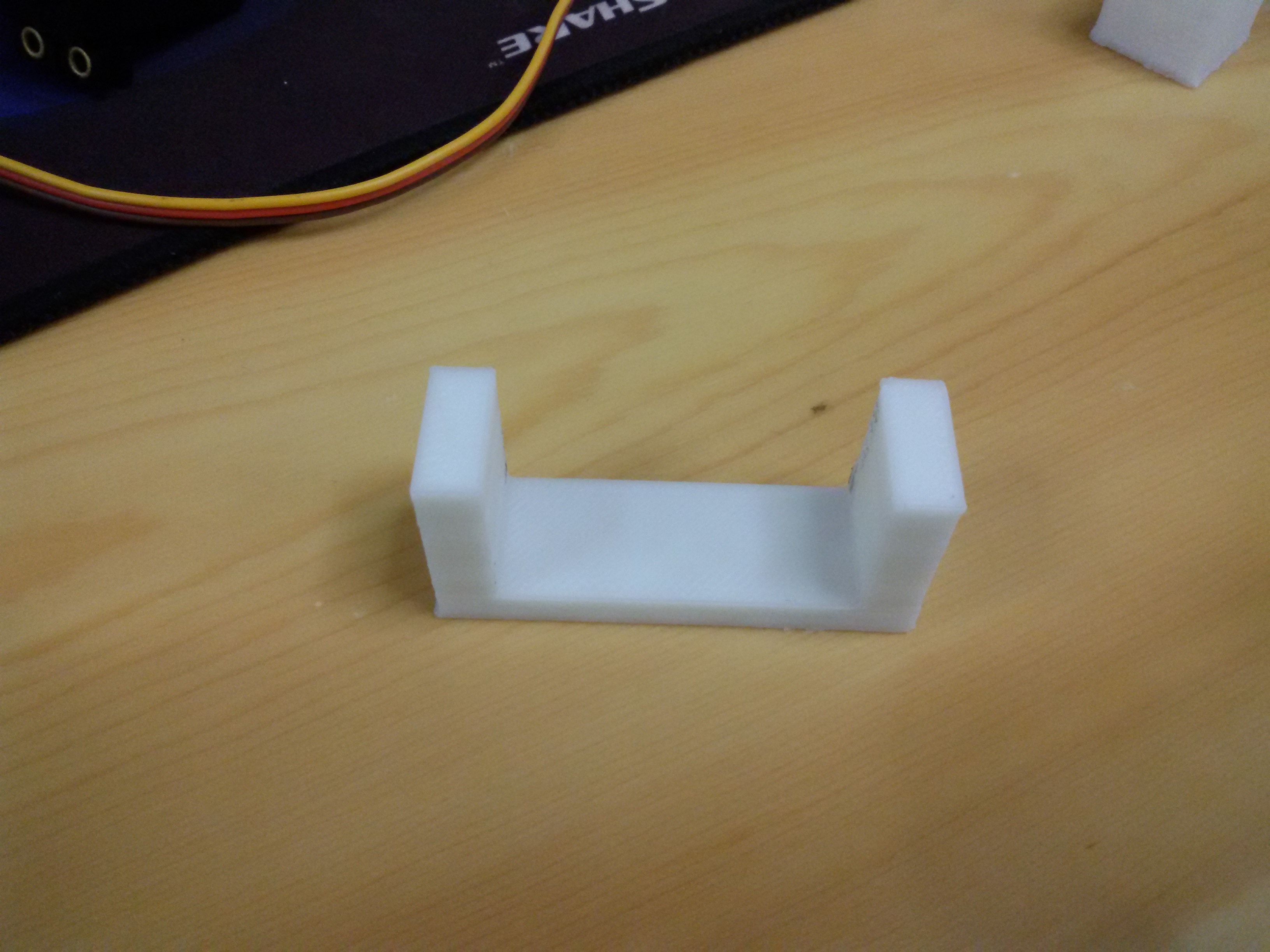 按照舵机的尺寸打印了下零件,发现有点小,误差在1mm。
按照舵机的尺寸打印了下零件,发现有点小,误差在1mm。  虽然可以塞进去,但是还是有点紧。
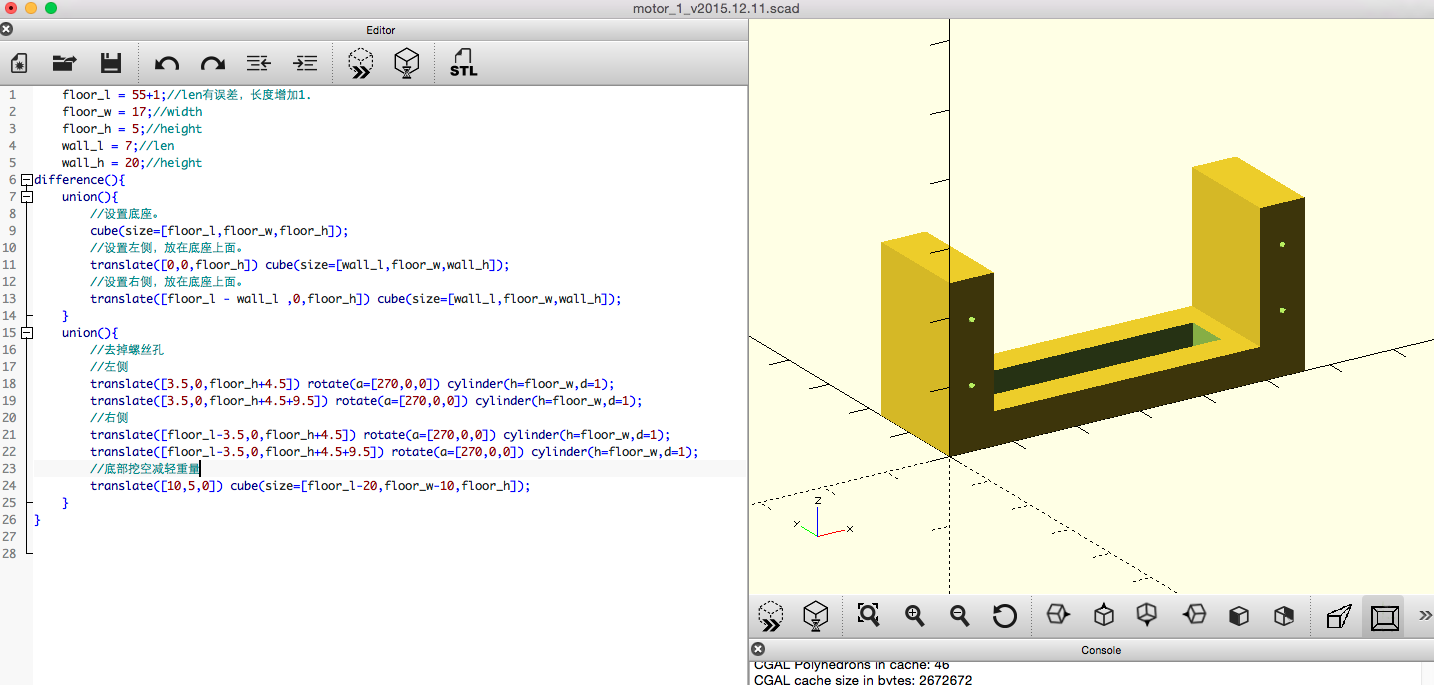
虽然可以塞进去,但是还是有点紧。 3,OpenSCAD设计图
设计的源代码:
floor_l = 55+1;//len有误差,长度增加1.floor_w = 17;//widthfloor_h = 5;//heightwall_l = 7;//lenwall_h = 20;//heightdifference(){ union(){ //设置底座。 cube(size=[floor_l,floor_w,floor_h]); //设置左侧,放在底座上面。 translate([0,0,floor_h]) cube(size=[wall_l,floor_w,wall_h]); //设置右侧,放在底座上面。 translate([floor_l - wall_l ,0,floor_h]) cube(size=[wall_l,floor_w,wall_h]); } union(){ //去掉螺丝孔 //左侧 translate([3.5,0,floor_h+4.5]) rotate(a=[270,0,0]) cylinder(h=floor_w,d=1); translate([3.5,0,floor_h+4.5+9.5]) rotate(a=[270,0,0]) cylinder(h=floor_w,d=1); //右侧 translate([floor_l-3.5,0,floor_h+4.5]) rotate(a=[270,0,0]) cylinder(h=floor_w,d=1); translate([floor_l-3.5,0,floor_h+4.5+9.5]) rotate(a=[270,0,0]) cylinder(h=floor_w,d=1); //底部挖空减轻重量 translate([10,5,0]) cube(size=[floor_l-20,floor_w-10,floor_h]); }} 主要就是长方体组合和挖洞。
 然后导出成stl文件。使用Cura进行打印。
然后导出成stl文件。使用Cura进行打印。 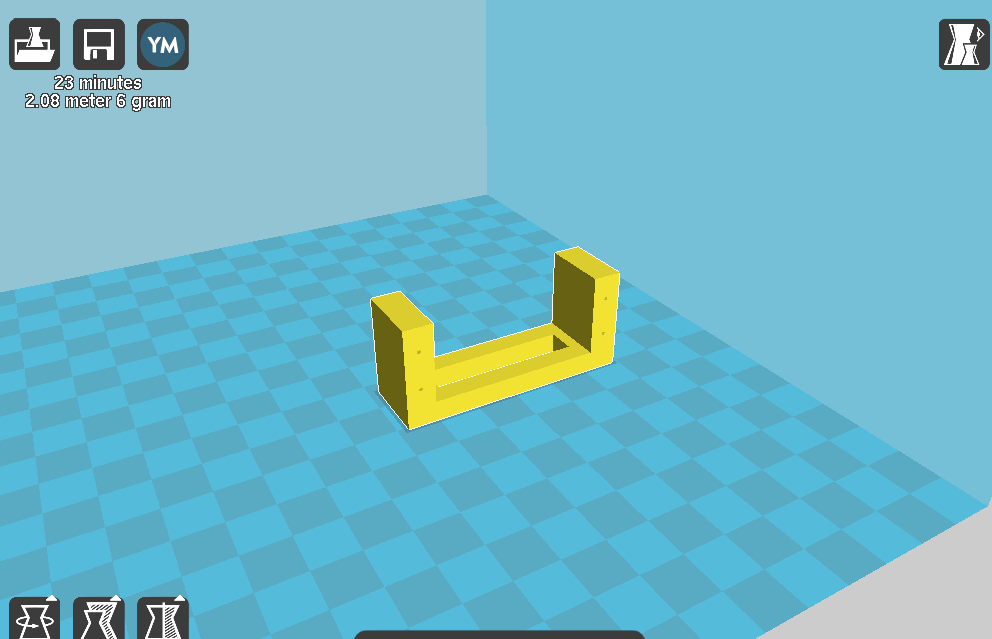 这次刚刚好,还将底部挖了个洞,减轻重量,节省材料。
这次刚刚好,还将底部挖了个洞,减轻重量,节省材料。 本文的原文连接是: 未经博主允许不得转载。
博主地址是:4,总结
使用openscad进行设计还是非常方便的。
可以做一个舵机支架,螺丝孔,位置,都可以自己设计。 打印这样一个小零件只需要 20 分钟,零件也很坚固。 效率非常高,能很好的利用3d打印的优势,但是由于自己组装的打印机有误差,所以需要调整下才能做出合适的零件。 openscad非常适合程序员进行编程,就像写代码一样设计3d零件。
你可能感兴趣的文章
数据中心可靠级别划分
查看>>
[Python] 运算符与表达式
查看>>
LVM
查看>>
我的友情链接
查看>>
你真的理解什么是“财富自由”吗?
查看>>
释放LINUX内存(请使用火狐浏览器浏览本页面)
查看>>
Andrew Ng 深度学习笔记-01-week3-课程
查看>>
Android获取通过XML设置的空间的高宽
查看>>
生活的苦逼
查看>>
在iptables防火墙下开启vsftpd的端口
查看>>
Mysql、MariaDB 新型主从集群配置GTID
查看>>
Linux HA Cluster的实例演示(2)
查看>>
描述linux下文件删除的原理
查看>>
debian vs centos哪个更好
查看>>
python不同的内容邮件群发
查看>>
hive 的hiveserver2 服务端配置
查看>>
linux学习笔记----2
查看>>
java中简单的db封装
查看>>
CIKERS Shane 20190613
查看>>
ubuntu安装megacli
查看>>